1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
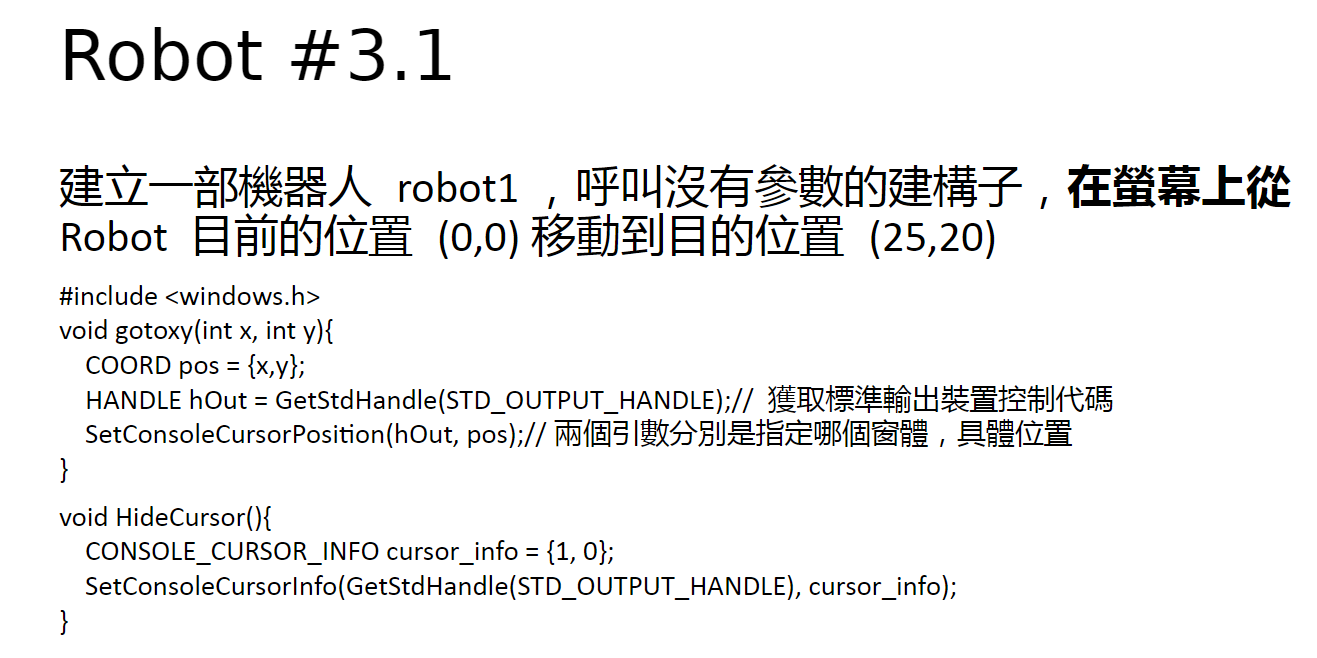
| #include <bits/stdc++.h>
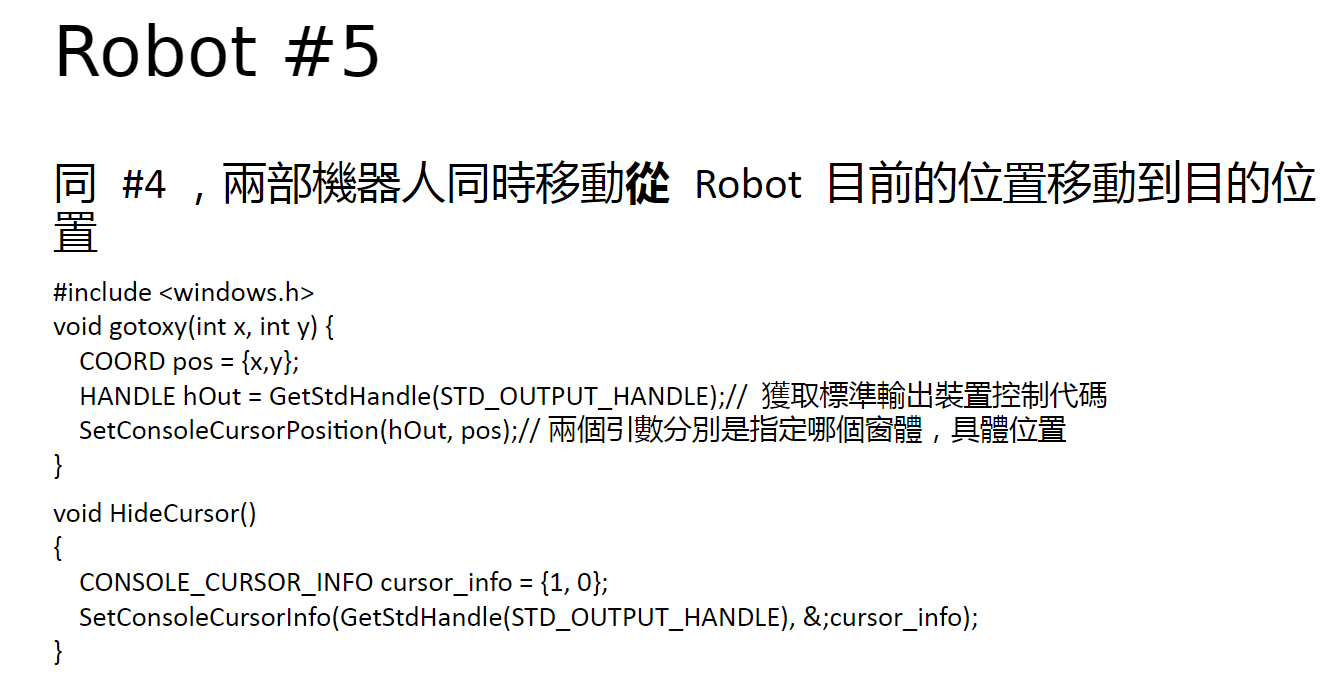
#include <windows.h>
using namespace std;
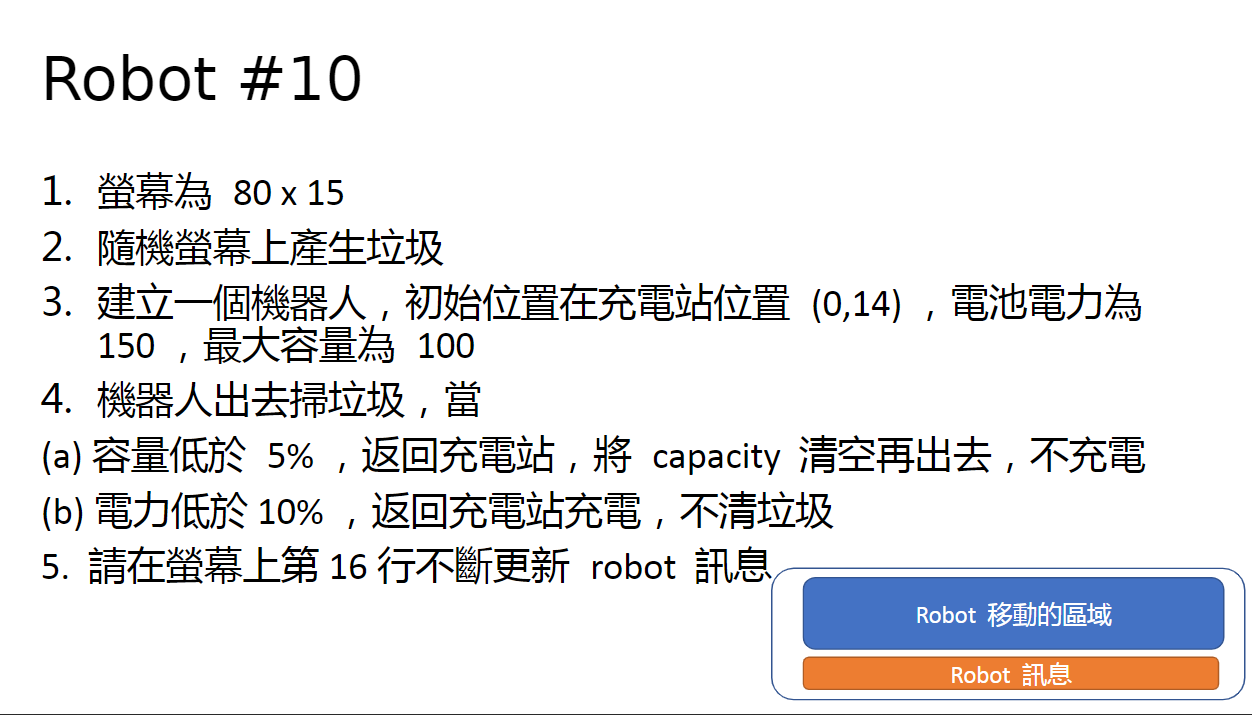
#define width 80
#define height 15
void gotoxy(int x, int y){
COORD pos;
HANDLE hOut = GetStdHandle(STD_OUTPUT_HANDLE);
pos.X = x, pos.Y = y;
SetConsoleCursorPosition(hOut, pos);
}
void HideCursor(){
CONSOLE_CURSOR_INFO cursor_info = {1, 0};
SetConsoleCursorInfo(GetStdHandle(STD_OUTPUT_HANDLE), &cursor_info);
}
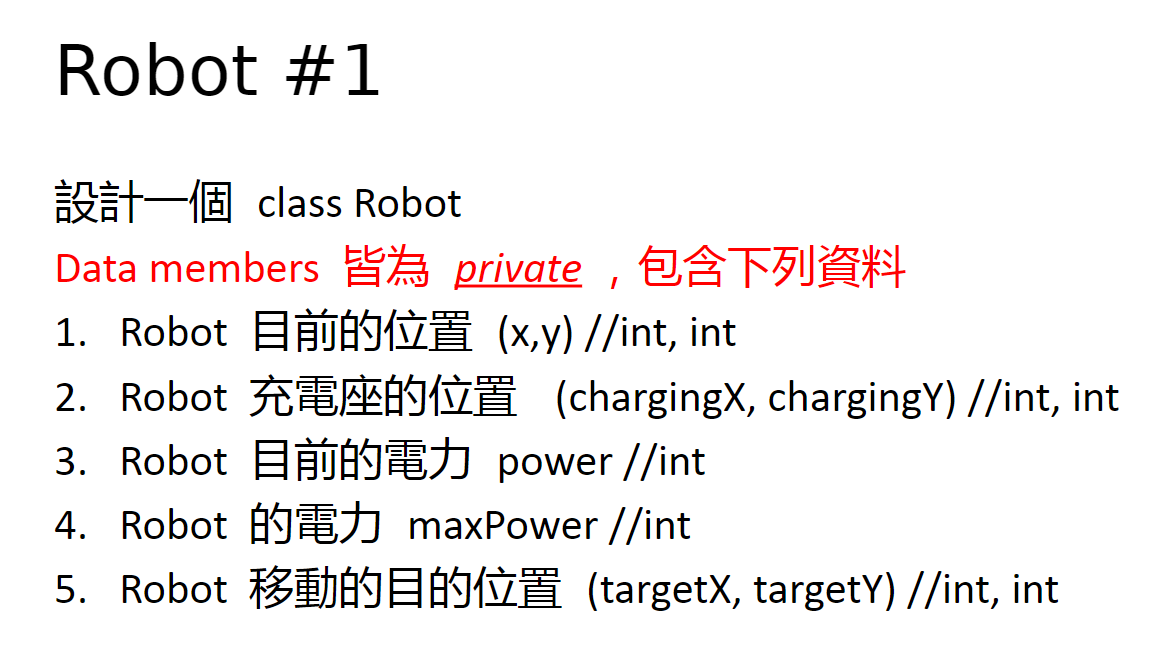
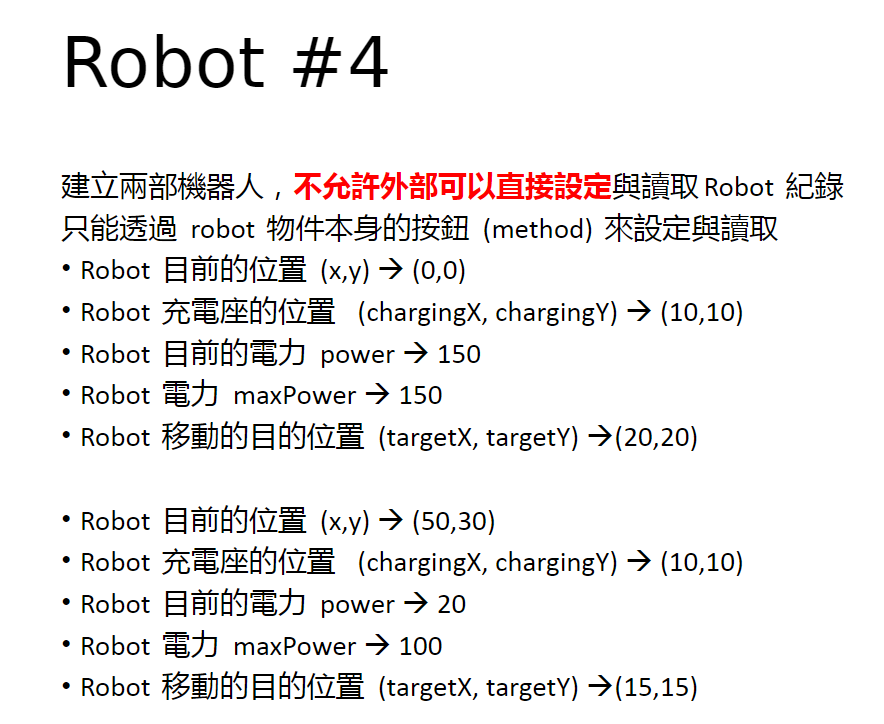
class Robot{
private:
int x;
int y;
int chargingX;
int chargingY;
int power;
int maxPower;
int targetX;
int targetY;
public:
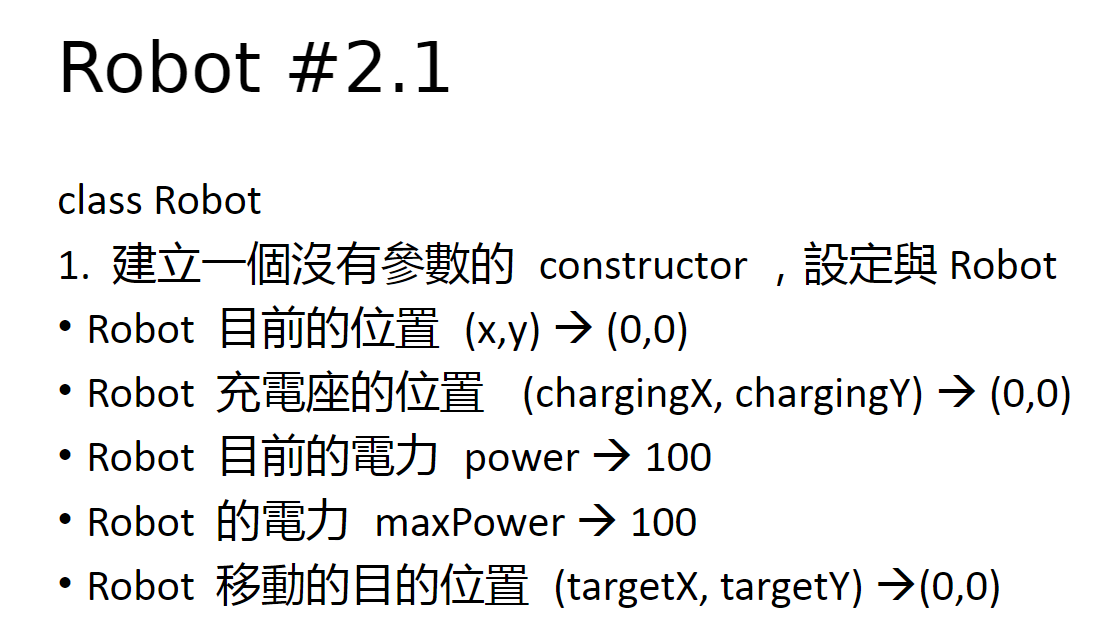
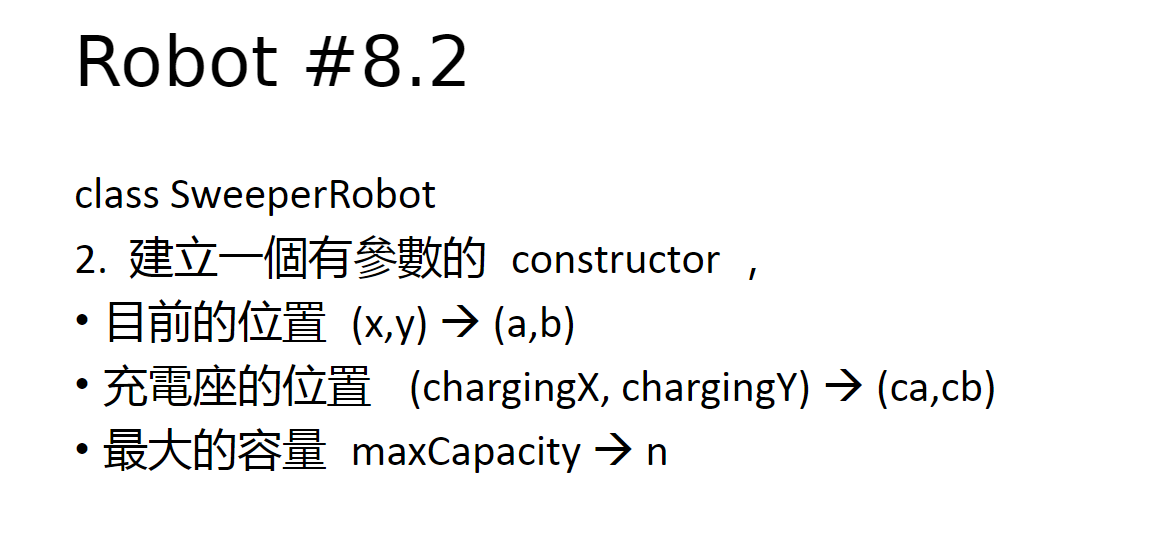
Robot(): x(0), y(0), chargingX(0), chargingY(0), power(100), maxPower(100), targetX(0), targetY(0){}
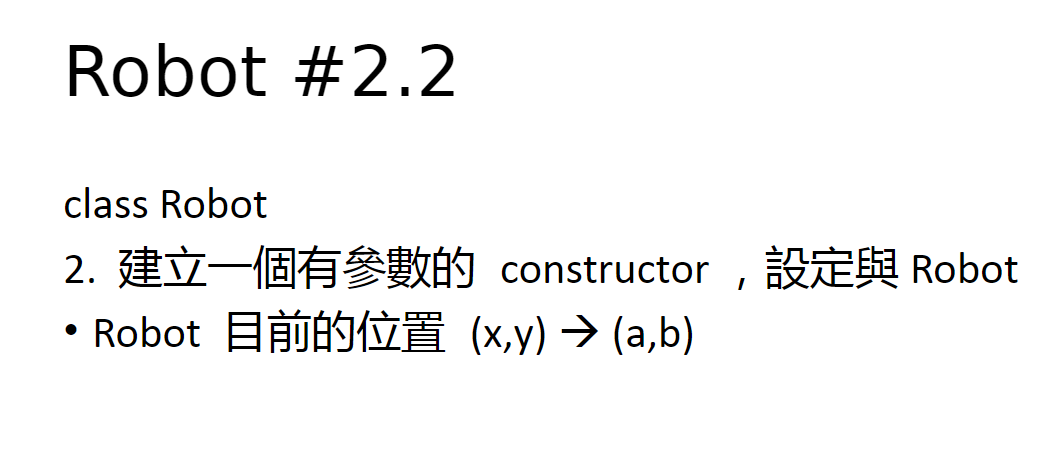
Robot(int a, int b): x(a), y(b), chargingX(0), chargingY(0), power(100), maxPower(100), targetX(0), targetY(0){}
Robot(int a, int b, int ca, int cb): x(a), y(b), chargingX(ca), chargingY(cb), power(100), maxPower(100), targetX(0), targetY(0){}
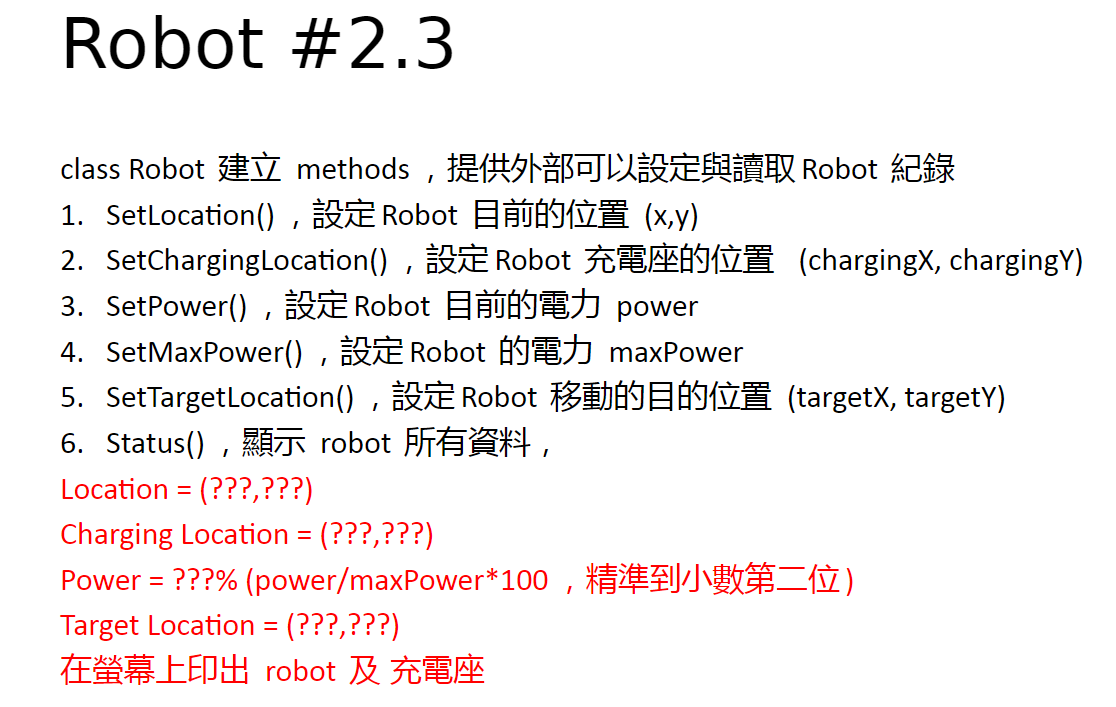
void SetLocation(int a, int b){
x = a;
y = b;
}
void SetChargingLocation(int cx, int cy){
chargingX = cx;
chargingY = cy;
}
void SetPower(int p){
power = p;
}
void SetMaxPower(int p){
maxPower = p;
}
double PowerPro(){
return (double)power/(double)maxPower*100.0;
}
void SetTargetLocation(int tx, int ty){
targetX = tx;
targetY = ty;
}
bool clearSuc(){
if(x == targetX && y == targetY) return true;
return false;
}
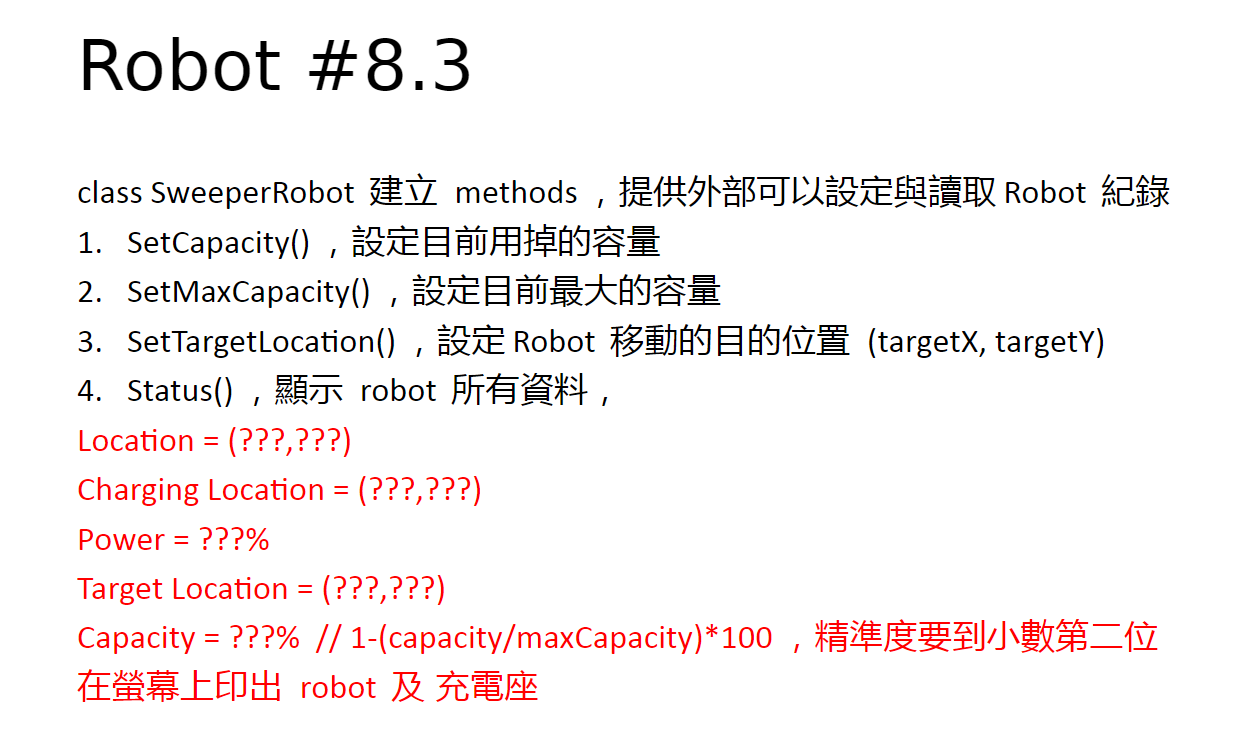
void Status(){
gotoxy(0, 16);
cout << "Location = (" << x << "," << y << ") ";
gotoxy(0, 17);
cout << "Charging Location = (" << chargingX << "," << chargingY << ") ";
gotoxy(0, 18);
cout << "Power = ";
cout << fixed << setprecision(2) << PowerPro() << "% ";
gotoxy(0, 19);
cout << "Target Location = (" << targetX << "," << targetY << ") ";
gotoxy(0, 20);
}
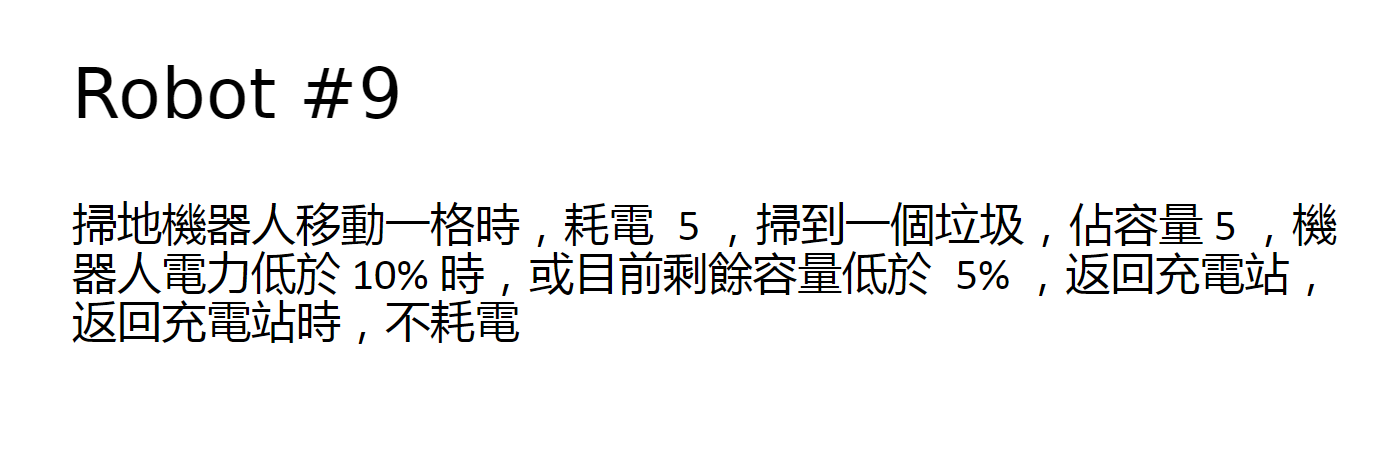
bool MoveTo(double CapacityPro){
if(x == targetX && y == targetY) return false;
if(PowerPro() >= 10 && CapacityPro >= 5){
power -= 5;
gotoxy(x, y);
cout << " ";
if(x < targetX) ++x;
else if(x > targetX) --x;
if(y < targetY) ++y;
else if(y > targetY) --y;
gotoxy(x, y);
cout << "R";
}
else {
gotoxy(x, y);
cout << " ";
if(x < chargingX) ++x;
else if(x > chargingX) --x;
if(y < chargingY) ++y;
else if(y > chargingY) --y;
gotoxy(x, y);
cout << "R";
}
if(x == chargingX && y == chargingY){
if(PowerPro() < 10) power = maxPower;
else return true;
}
return false;
}
};
class SweeperRobot: public Robot{
private:
int capacity;
int maxCapacity;
public:
SweeperRobot():Robot(){}
SweeperRobot(int a, int b, int ca, int cb, int n):Robot(a, b, ca, cb){
capacity = 0;
maxCapacity = n;
}
void SetCapacity(int c){
capacity = c;
}
void SetMaxCapacity(int c){
maxCapacity = c;
}
void SetTargetLocation(int tx, int ty){
Robot::SetTargetLocation(tx, ty);
}
double CapacityPro(){
return (1.0-(double)capacity/(double)maxCapacity)*100.0;
}
void MoveTo(int mode = 0){
bool clearCapacity = Robot::MoveTo(CapacityPro());
if(clearCapacity) capacity = 0;
Status();
}
void Status(){
Robot::Status();
cout << "Capacity = ";
cout << fixed << setprecision(2) << CapacityPro() << "% ";
}
bool clearSuc(){
if(Robot::clearSuc()){
capacity += 5;
return true;
}
return false;
}
};
class Garbage{
private:
int x;
int y;
public:
int GetX(){
return x;
}
int GetY(){
return y;
}
Garbage(){
x = rand() % width;
y = rand() % height;
show();
}
void show(){
gotoxy(x, y);
cout << "G";
}
};
int main(){
srand(time(NULL));
HideCursor();
SweeperRobot *srobot = new SweeperRobot(0, 14, 0, 14, 100);
srobot->SetPower(100);
srobot->SetMaxPower(1000);
srobot->SetTargetLocation(50, 10);
int time = 0;
queue<Garbage*> q;
Garbage * gar = new Garbage();
q.push(gar);
Garbage *temp = q.front();
while(true){
Sleep(20);
++time;
if(!q.empty()){
temp = q.front();
srobot->SetTargetLocation(temp->GetX(), temp->GetY());
if(srobot->clearSuc()){
q.pop();
delete temp;
}
}
if(time % 50 == 0){
Garbage * gar = new Garbage();
q.push(gar);
}
srobot->MoveTo();
}
return 0;
}
|